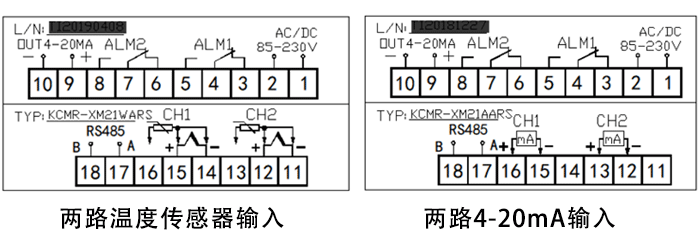
产品型号:KCMR-XM21WARS KCMR-XM21WA KCMR-XM21AA KCMR-XM21AARS
| 序号 | 提示符 | 名称 | 说明 |
| 0 | LOCK | 密码锁 | LOC=18时,允许修改所有参数, LOC≠18时,禁止修改所有参数 |
| 1 | SP | 设定值 | 控制点温度设定参数 |
| 2 | HY | 主控回差 | 仪表为位式控制方式时的不灵敏区 |
| 3 | AL_1 | 报警设定值 | 报警点温度设定参数 |
| 4 | AL_2 | ||
| 5 | HY_1 | 报警回差 | 用于报警触点输出的回差设定(单边回差) |
| 6 | HY_2 | ||
| 7 | SC1 | 传感器修正值 | 测量传感器引起误差时,可以用此值修 |
| 8 | SC2 | ||
| 9 | ALP | 报警方式 | 0:无报警输出 1:2路上限报警 2:2路下限报警 3:AL1上限报警 AL2下限报警 4:AL1下限报警 AL2上限报警 5:AL1温差上限报警(PV1-PV2) AL2温差上限报警(PV2-PV1) 6:AL1温差下限报警(PV1-PV2) AL2温差下限报警(PV2-PV1) 7: AL1温差上限报警(PV1-PV2) AL2温差下限报警(PV2-PV1) 8: AL1温差下限报警(PV1-PV2) AL2温差上限报警(PV2-PV1) |
| 10 | OPA | 主控方式 | OPA=0:无主控输出 OPA=1:PV1变送输出 OPA=2:PV2变送输出 OPA=3:温差变送输出(PV1-PV2) OPA=4:温差变送输出(PV2-PV1) OPA=5:绝对温差变送|PV1-PV2| OPA=6: PV1 PID输出 OPA=7: PV2 PID输出 OPA=8: 温差PID(PV1-PV2) OPA=9: 平均PID(PV1+PV2)/2 |
| 11 | P | 比例系数 | P值类似常规PID调节器的比例带 设置P=0仪表转为二位式控制。 |
| 12 | I | 积分系数 | 为了消除稳态误差,在控制器中必须引入“积分项”。 |
| 13 | D | 微分系数 | 控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系 |
| 14 | T | 控制周期 | 指主控为PID控制方式的控制周期 |
| 15 | U0 | 初始功率 | PID智能控制时的初始输出功率 |
| 16 | AT | 自整定开关 | OFF:自整定功能关闭 ON:自整定功能开启 自整定过程请参考“六、自整定方法” |
| 17 | COOL | 正反控制 | 0:正向控制,如加热,加湿; 1:反向控制,如制冷,除湿 |
| 18 | PF | 滤波系数 | 为仪表一阶滞后滤波系数,其值越大,抗瞬间干扰性能越强,但响应速度越滞后。 |
| 19 | SN | 输入规格 | CU50、Pt100、K、E、J、T或4-20mA |
| 20 | PB_H | 变送上限 | 设定输出20mA(或10v)时的温差值 |
| 21 | PB_L | 变送下限 | 设定输出4mA(或0v)时的温差值 |
| 22 | PSH1 | 量程上限 | 第1路电流信号显示上限 下限 当输入模拟量信号时显示本条参数 |
| 23 | PSL1 | 量程下限 | |
| 24 | PSH2 | 量程上限 | 第2路电流信号显示上限 下限 当输入模拟量信号时显示本条参数 |
| 25 | PSL2 | 量程下限 | |
| 26 | DP | 小数点 | 小数点位置 |
| 27 | OUTH | 输出上限 | OUT主控输出功率的最高与最低限幅 电流输出4-20mA即为4.0-20.0 电压输出0-10v即为0-20.0 |
| 28 | OUTL | 输出下限 | |
| 29 | OPB | 通讯功能 | 0.无通讯; 1.RS485串口通讯 |
| 30 | ADDR | 通讯地址 | 仪表在集中控制系统中的编号 |
| 31 | BAUD | 通讯波特率 | 1200; 2400; 4800; 9600 四种可选 |