产品型号:KCMR-91WBS KCMR-92WBS
| 参数代码 | 符号 | 名称 | 取值范围 | 说 明 | 出厂值 | 0 | SP | 温度设定值 | P-SL、P-SH决定 | 预期达到的温度设定值 | 100 |
|---|---|---|---|---|---|
| 1 | AL-1 | 报警上限值 | 可有ALP参数决定功能 | 300 | |
| 2 | AL-2 | 报警下限值 | 50 | ||
| 3 | PB | 温度修正值 | ±20.0 | 测量值误差时用此参数修改 | 0 |
| 4 | KP | 比例系数 | 1到9999 | P值类似常规PID调节器的比例带,但变化相反,P值越大,比例、微分的作用成正比增强, P值越小,比例、微分的作用相应减弱,P参数值与积分作用无关。 P=0时,转为二位式控制(上下限控制) |
100 |
| 5 | KI | 积分系数 | 0~3000 | I参数值主要决定调节算法中的积分作用,与常规PID算法中的积分时间类同,I值越小,系统积分作用越强,I值越大,积分作用越弱。设置I=0时,系统取消积分作用,仪表成为一个PD调节器。 | 500 |
| 6 | KD | 微分系数 | 0~2000S | d参数对控制的比例、积分、微分均起影响作用,d越小,则比例和积分作用均成正比增强;反之,d越大,则比例和积分作用均减弱,而微分作用相对增强。此外d还影响超调抑制功能的发挥,其设置对控制效果影响很大。 如设置d≤t(控制周期)时,系统的微分作用被取消。 | 100S |
| 7 | KT | 时间周期 | 2~120 | 指主控为人工智能PID控制方式,输出为继电器时的控制周期,时间越短,控制效果越好,但会影响继电器寿命。一般出厂值继电器设置为20S,其他设置为2S。 | 20S |
| 8 | FC | 滤波系数 | 0~99 | 为仪表一阶滞后滤波系数,其值越大,抗瞬间干扰性能越强,但响应速度越滞后,对压力、流量控制其值应较小,对温度、液位控制应相对较大。 | 20 |
| 9 | HY | 主控回差 | 0.1~50.0 | 仪表为位式控制方式时的不灵敏区,取值越小,控制效果越好,但当为继电器输出时因频繁跳动而影响使用寿命 | 0.5 |
| 10 | DP | 小数点个数 | 0~3 | dp=0时小数点在个位不显示,当dp=1~3时,小数点依次在十位、百位、千位。当仪表为热电偶或热电阻输入时,dp只能0或1。 | 0或1 |
| 11 | OUTH | 输出上限 | outL~200 | 当仪表控制为电压或电流输出(如控制阀位时),仪表具有最小输出和最大输出限制功能。 | 200 |
| 12 | OUTL | 输出下限 | 0~outH | 0 | |
| 13 | AT | 自整定系数 | 0~1 | 0:关闭自整定; 1:启动自整定 | 0 |
| 14 | LOCK | 密码锁 | 0~50 | 为0时,允许修改所有参数,为1时,只允许修改给定值(SP),大于1时,禁止修改所有参数 | 0 |
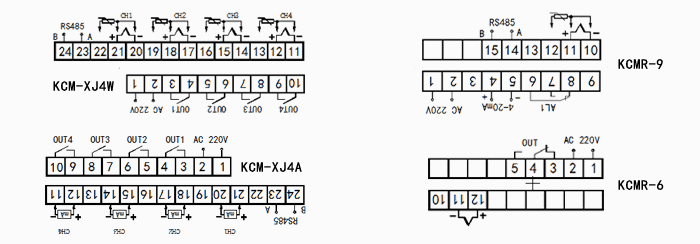
| 15 | TS | 传感器类型 | —— | Cu50、 Pt100、 K、 E 、J、 T、 S、 R、WR25、 N、 0~50mV、 10~50mV、 0~5V/0~10mA、 1~5V/4~20mA | |
| 16 | OP_A | 主控输出 | 0~7 | ‘0’无输出;‘1’继电器输出;‘2’固态继电器输出;‘3’过零触发;‘4’移相触发;‘5’0~10mA或0~5V; ‘6’4~20mA或1~5V;7’阀位控制 | 禁止修改 |
| 17 | OP_B | 辅助控输出 | 0~4 | ‘0’无输出;‘1’RS232或RS485通讯信号;‘2’接微型打印机‘3’0~10mA或0~5V变送输出;‘4’4~20mA或1~5V变送输出 | 禁止修改 |
| 18 | AL_P | 报警方式 | 0~10 | 0:无报警; 1:上限报警;2:下限报警; 3:上下限报警4:正偏差报警; 5:负偏差报警;6:正负偏差报警 7:区间外报警; | 按需求定 |
| 19 | COOL | 正反控选择 | 0~1 | 0:反向控制,如加热;1:正向控制,如制冷 | 0 |
| 20 | P_SH | 量程上限 | P-SL~9999 | 变送输出的量程上下限 | 1300 |
| 21 | P_SL | 量程下限 | -1999~P-SH | 0 | |
| 22 | ADDR | 通讯地址 | 0~63 | 仪表在集中控制系统中的编号 | 0 |
| 23 | BAUD | 通讯波特率 | —— | 1200; 2400; 4800; 9600 四种可选 | 9600 |